RESEARCH
2021年度 JKA機械工業振興補助事業研究補助
埋没型波動掘進ロボットの創成
研究の概要
|
本研究では,従来ロボットではアクセス不能であった地中を移動する革新的技術として,波動掘進メカニズムを応用した小型ロボットシステムの創成に向けたコア技術として,波動伝搬機構の研究開発をおこなった.螺旋階段翼を単回転アクチュエーションによって,回転軸方向への表面波動伝播に機械変換する新構造を提案する.この波動伝播機構は,柔軟なシリコンカバーで覆うことで,外界との間に隙間を持たない完全密閉型の波動伝播を実現する.これにより,地中での土壌の掘削と搬送を同時に生み出す革新的な波動伝播技術の実現可能性を示す.地中移動に資する本研究は,移動ロボット技術を刷新するブレイクスルー・テクノロジーであると同時に,搬送装置や掘削機構などの多様なアプリケーションにも繋がる基盤技術としての意義も併せ持つ. |
|
研究の目的と背景
これまでの災害レスキューロボットが抱えた大きな技術課題として,災害現場の不確かで渾然一体となった危機的状況において,現場の環境に柔軟に対応し切るのが難しい点が挙げられる.特に,近年多発する大雨や台風の被害によってもたらされる土砂災害現場では,地上を覆う土砂と瓦礫が,それらに埋もれた被災者の救助活動を妨げる大きな障壁となっている.結果として,二次災害を回避しつつ,重機などを用いて土砂と瓦礫を上から除くしか,救助活動を前進させる術がなかった.そこで本研究では,土砂災害現場での迅速な救助活動支援を刷新するブレイクスルー・テクノロジーとして,地上と比べて相対的に安定した地中環境を掘削しながら移動することで,被災地へのアプローチを可能とする,地中埋没型の掘進(掘削推進)ロボットの創成に挑む.まず本研究では,コア技術となる波動伝搬機構の技術実証にフォーカスを当てて研究開発を推し進め,将来的なロボット地中掘進に拡張するための技術開発をおこなうこととしている.
研究内容
本研究では,埋没型の波動掘進ロボットシステムの創成に向けて,コア技術となる波動伝搬機構の具現化と技術実証に取り組む.
波動伝播を実現する機械装置はこれまでにも存在していたが,地中掘進への応用に向けては,強度と実用性を兼ね備えた,小型でシンプル,高強度な構造によって波動伝播可能な機械メカニズムを実現することが求められる.そこで,単一の回転アクチュエータで駆動する螺旋階段翼シャフトによって,外周面上に回転軸方向への波動を生成する新たな波動伝播構造を着想し,そのアイデアを波動伝播ユニットと称して概念モデルとして具現化し,それを機械要素で構成した三次元CADモデルに基づく機械設計をおこなった(図1).本ユニットには,円滑な波動生成を補助する環状ガイド機構と外部リンク間を繋ぐワイヤーを取り付け,またユニット周囲を柔軟カバー(シリコンカバー)で覆うことにより,外界との接触を持たない防塵性に優れたメカニカルな波動伝播機構を実現することができた.さらに,駆動アクチュエータ(回転モータ)を螺旋階段翼シャフトに内蔵することで,従来の全周型波動伝播構造ではモータや歯車連動機構を外部に設ける必要があった点を解消し,小型で高強度な機械構造を実現することができた.
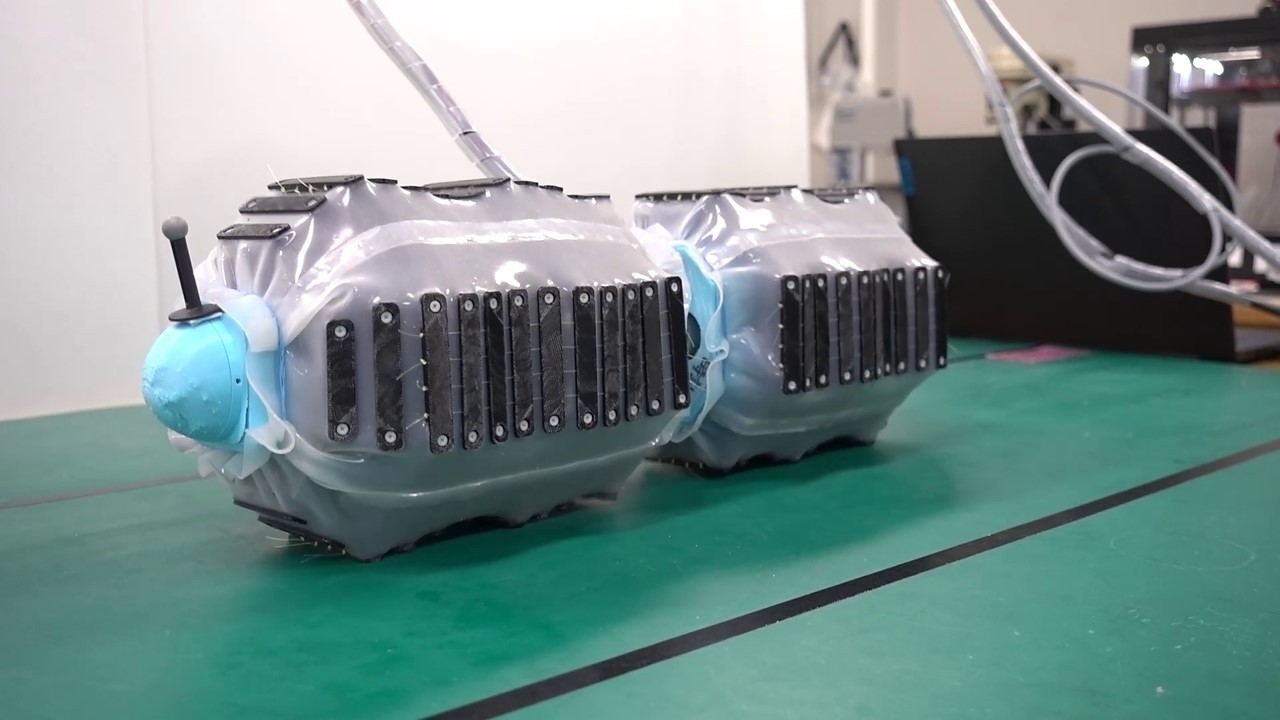
以上の波動伝播ユニットを連結して統合ロボットシステムの試作機を開発した.開発した試作機の概観を図2に示す.また,図6に試作機による表面移動実験の様子を示す.これにより,地中掘進に資する波動伝播機構の実現ができた.推進方向に対して前後2ユニット化することで,回転モータの反力を相殺し,本体反転をすることなく円滑に移動することが可能であることを確認した.その一方で,今後の課題として,土層を用いた簡易的な掘進実験を通じて,固く圧密された土壌地盤を掘削するには,より強固な掘削機構の付与が必要であることも明らかになった.結果的には,本研究開発事業の実施期間内では自立ロボットによる完全な埋没掘進には至らなかったものの,メカニカルな波動伝播というコア技術の提案・開発・実証を達成できた点は,今後の埋没掘進の実現に向けて重要なマイルストーンとなる成果である.
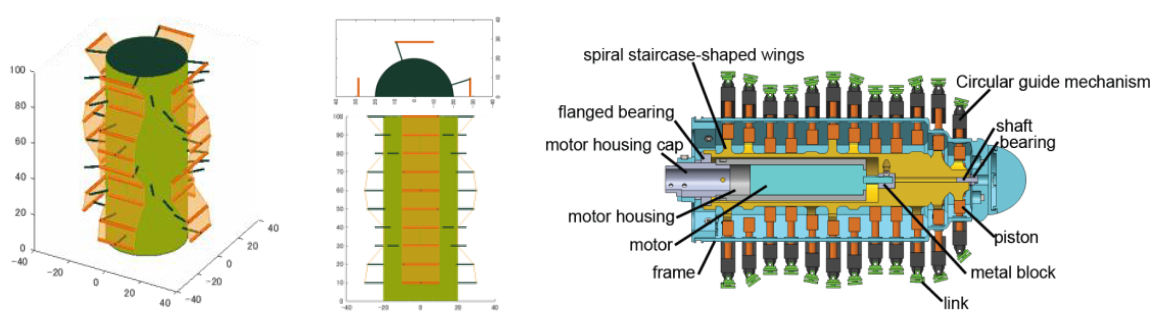
図1:波動伝播ユニットの設計
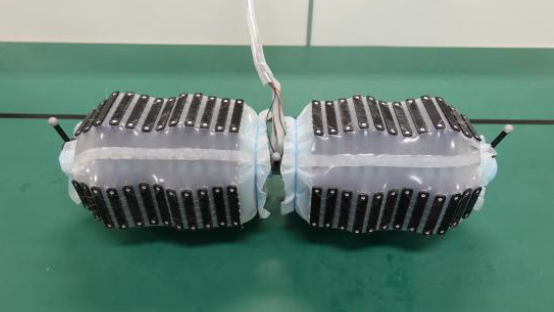
図2:統合ロボット試作機の概観
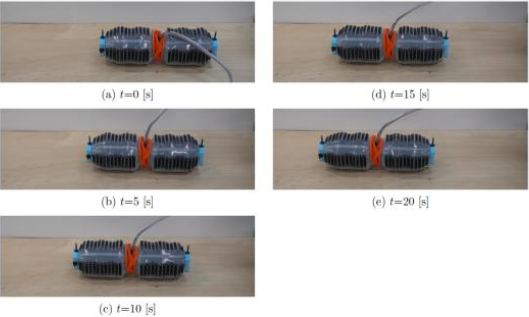
図3:表面推進実験の様子
本研究にかかわる知財・発表論文等
波動伝播機構
永岡健司,赤星美彩子,舎川拓馬
特願2021-200712(2021年12月10日 出願), 出願人: 国立大学法人九州工業大学.
螺旋階段翼を用いたメカニカル波動推進機構
赤星美彩子, 舎川拓馬, 永岡健司
第22回計測自動制御学会システムインテグレーション部門講演会, #1H4-02, 2021. SI2021優秀講演賞
軸方向波動伝播機構を用いた小型移動探査ロボットの設計開発
吉田健人, 赤星美彩子, 永岡健司
ロボティクス・メカトロニクス講演会2022, #1P1-H03, 2022.
本事業内容についての問い合わせ先
九州工業大学 大学院工学研究院 機械知能工学研究系
〒804-8550 福岡県北九州市戸畑区仙水町1-1
教授 永岡 健司
E-MAIL:CONTACTを参照
