RESEARCH
これまでの学位論文の研究テーマは こちら
これまでに獲得した外部資金・競争的資金は こちら
研究室の公式YouTubeチャンネルは こちら
研究領域
SCOPE: Space Robotics and Mechatronics

マイクログラビティ・ロボティクス -Microgravity Robotics-
マイクログラビティ(微小重力)な宇宙環境下で活動するロボット技術に関する研究です.マイクログラビティ・ロボティクスでは,対象とするロボットシステムが外環境との相互作用によって生じる「反力」と,ロボットシステム自身の運動によって生じる「反動」のダイナミクスを統合的に理解した上で,適切に運動を制御することが重要となります.
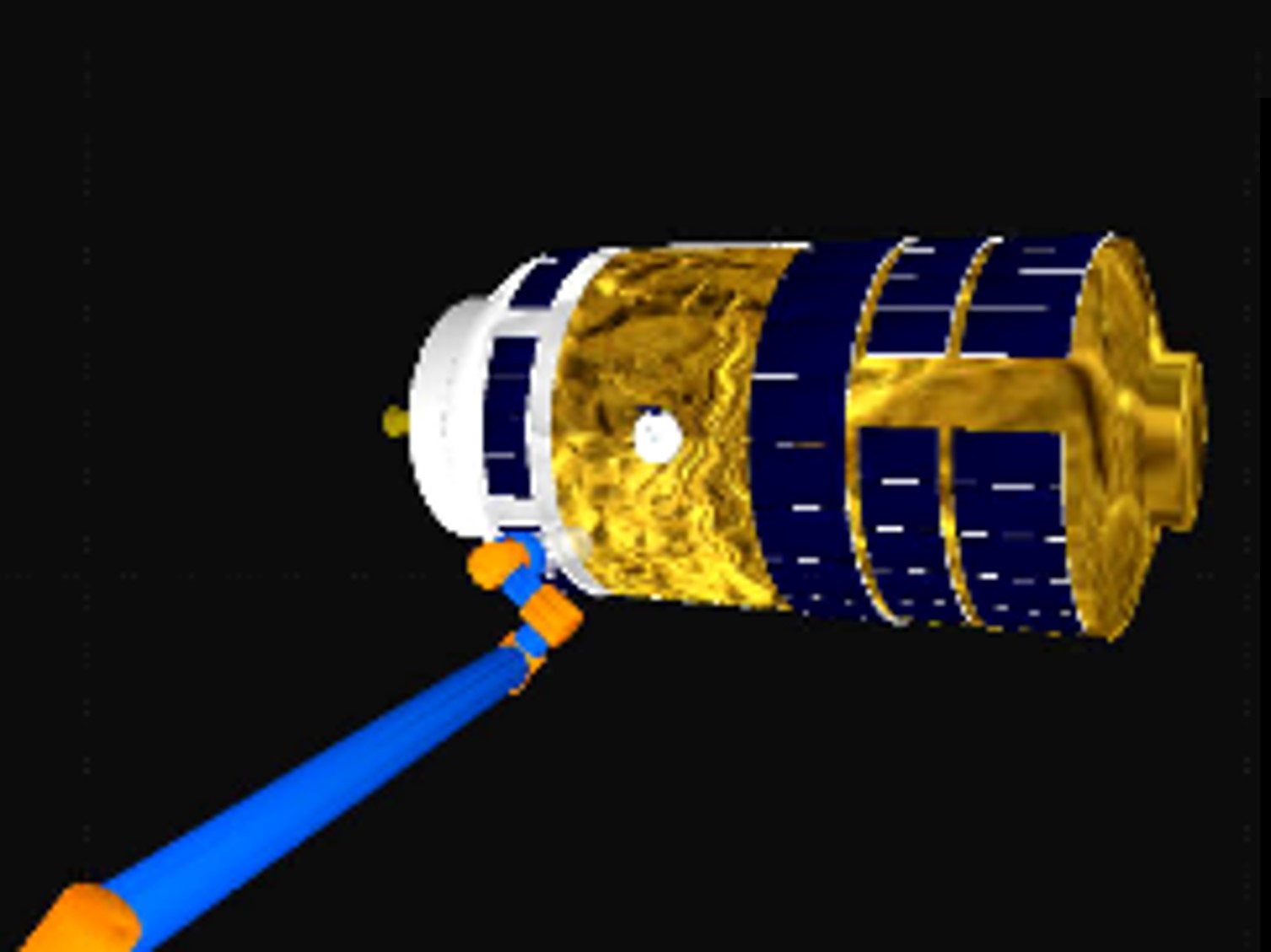
軌道上ロボティクス -Orbital Robotics-
|
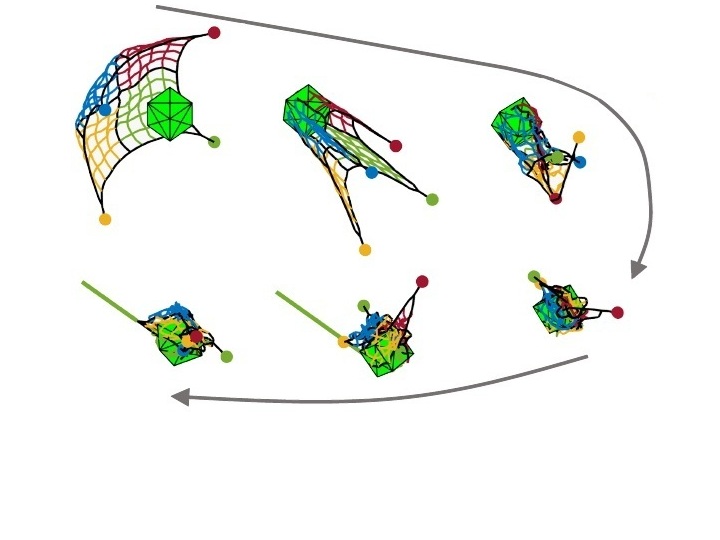
地球周回軌道上の微小重力環境における,ロボットアーム搭載の宇宙ロボットによるスペースデブリ(宇宙ゴミ)の捕獲・除去に関する力学と制御や,国際宇宙ステーションなどの大型宇宙構造物に取り付けられた長大な宇宙マニピュレータを用いた無人宇宙船の捕獲・ドッキング技術に関する研究を行ってきています.特に,宇宙空間をタンブリング運動(複雑な回転運動)しながら浮遊するデブリ衛星の捕獲へ向けて,多自由度ロボットアームによる物理的接触を介したターゲットデブリとのデタンブリング制御(相対運動制御)と捕獲について,制御理論の構築と実験的検証を進めています.軌道上で安全かつロバストな捕獲の実現に向けて,双腕宇宙ロボットによる繰り返し衝突やケージングを用いた捕獲手法の提案と検証,ならびに衝突捕獲に適した高ダンピングなロボットハンドの研究開発にも取り組んでいます.また,柔軟ネット構造を用いた宇宙デブリ捕獲に関する研究として,動力学シミュレータの開発と実験解析を進めています(この成果はJKA機械工業振興補助事業の助成を受けて実施しました,※JKA成果報告). |
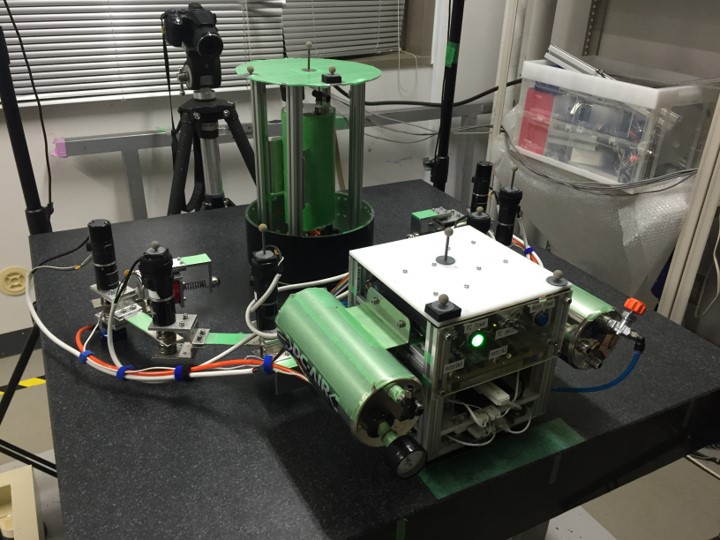
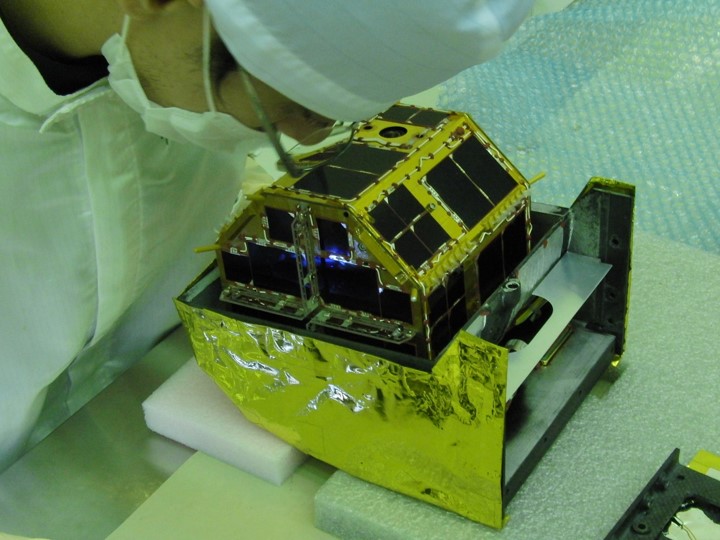
小天体探査ロボティクス -Robotics for Minor Body Exploration-
|
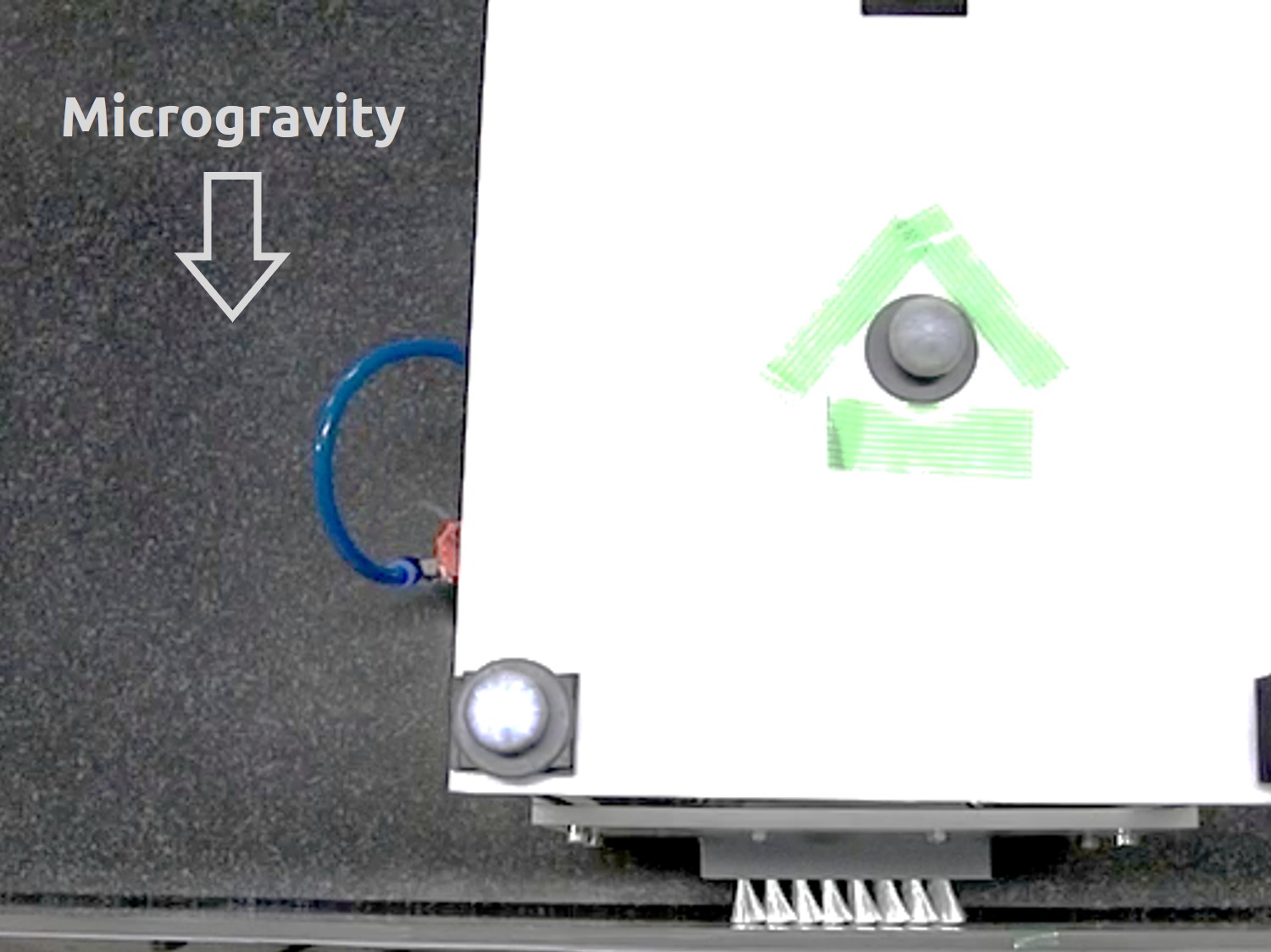
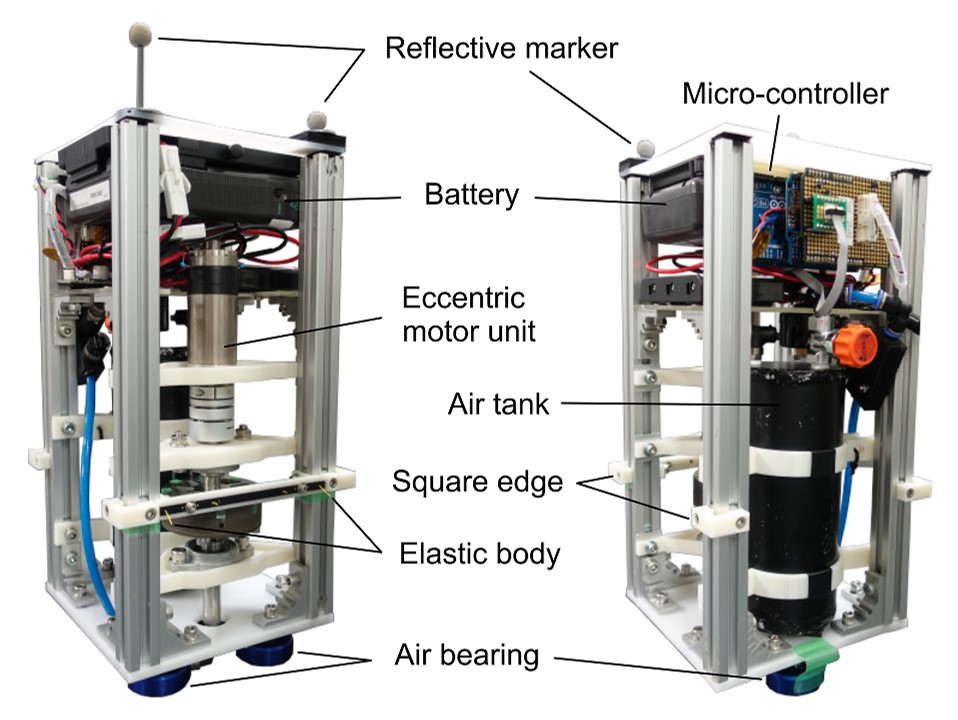
小惑星や彗星などに代表される微小重力を有する太陽系小天体の探査において,次世代のロボット探査を実現することを目的として,未知かつ不均一な地形での移動探査を実現するメカニズムの創成と運動制御に関する研究を行っています.また,学術的視点のみならず,はやぶさ2に搭載された小惑星探査ロボットMINERVA-II-2フライトモデルの共同開発にも携わってきた経験を生かして,実践的応用を目指しています.これまで,微小重力下での新たな移動メカニズムとして,繊毛(弾性体)と振動モータを組み合わせた振動推進の実現可能性を実証するとともに(この研究はJSPS科研費JP24760193の助成を受けて実施した内容です),その概念を拡張させて,ロボット表面の弾性体と偏心モータを組み合わせることで,1つのアクチュエータで「遠心力による振動推進」と「反トルクによる回転ホップ移動」を適応的に制御可能なメカニズムを提案し,実証してきています.さらに,発展的なアイデアとして,転動を生かした新たな移動メカニズムへの拡張にも取り組んできています. |
|
 惑星探査ロボティクス - Planetary Robotics -
惑星探査ロボティクス - Planetary Robotics -
地球外天体上を移動探査する,主に車輪移動機構を有した惑星探査ローバの走行力学と制御に関する研究を行っています.非常に細かな砂で覆われた月や火星のような極限環境で移動探査を行う上では,車輪と軟弱地盤との相互力学(テラメカニクス)を把握し,限られたセンシング情報を組み合せて所望の走行制御を実現することが必須となります.また,無人で移動探査を行う車輪型ロボットの実現に向けては,ロボット自身の知能化・自律化技術も実現すべきキーテクノロジーとなります.
テラメカニクス -Terramechanics-
|
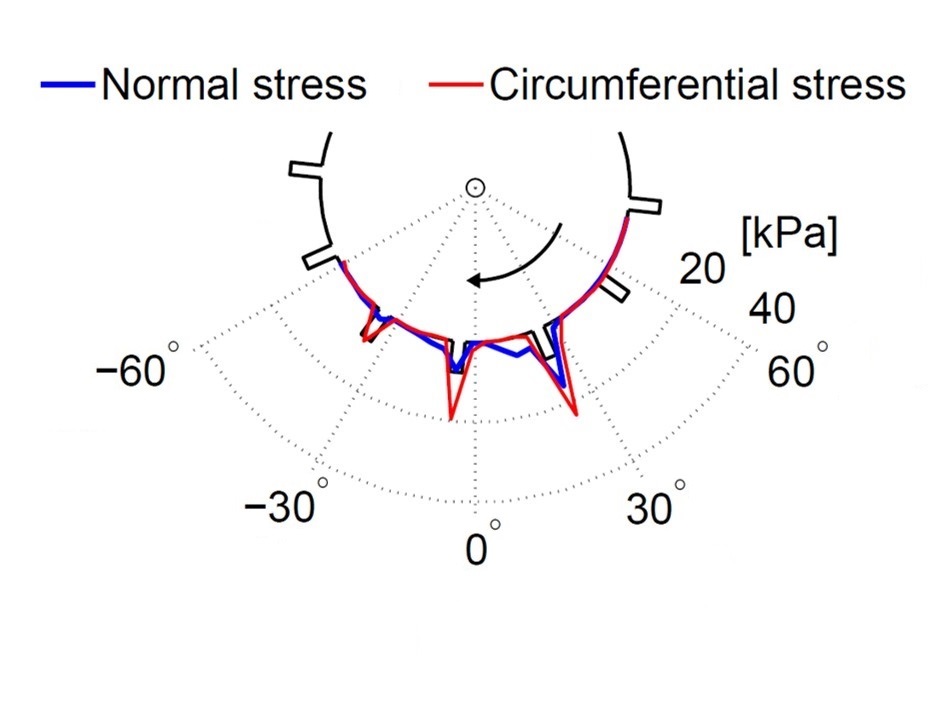
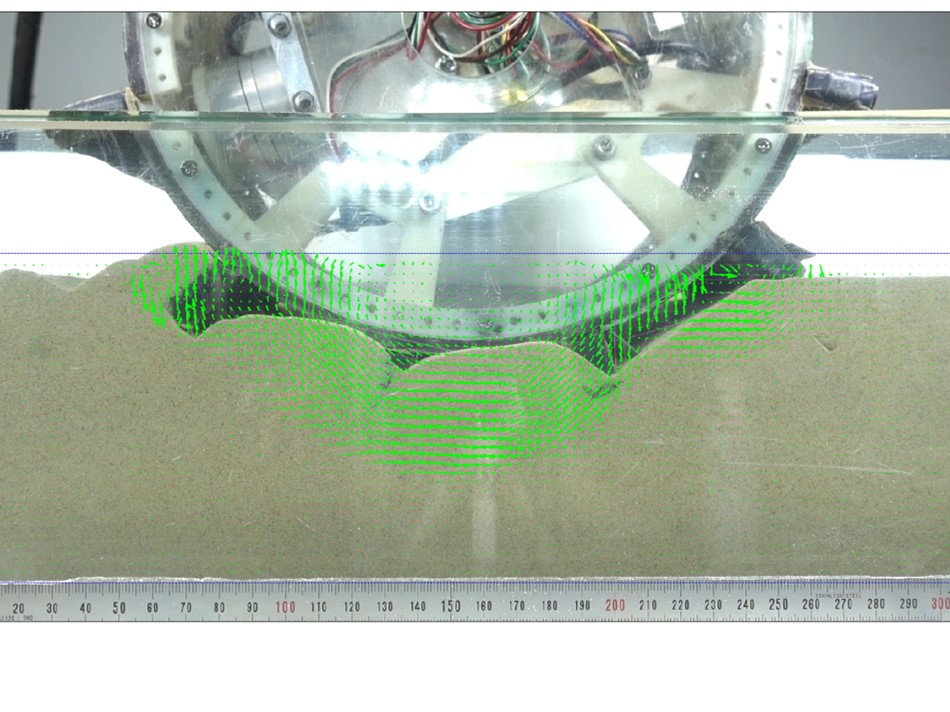
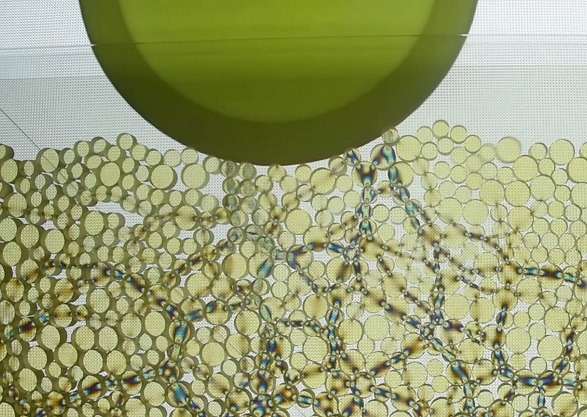
月や火星の表面を覆う非常に細かな土壌(レゴリス)の上において,車輪型の探査ローバが確実かつ効率的な移動探査を遂行するためには,車輪と砂との力学的相互作用(テラメカニクス)の体系的理解と,走行条件や設計条件が「走行性能」に与える影響の包括的な解析が重要となります.これまで高精度な力・トルクセンサを用いることで,スリック車輪やグラウサ車輪(ラグ付き車輪)の表面に作用する砂反力の応力分布の計測,粒子画像流速測定法PIVを用いた車輪下部の砂の流動解析,および光弾性法を用いた走行解析によって,力学的相互作用の包括的な知見を得ることで,走行力学の実験的解明に迫る成果を挙げてきています.また,これまで得られた知見に基づき,砂地を走行するグラウサ車輪の力学モデリングに取り組んでおり,ビークルの運動制御則への応用を視野に入れた力学モデルの構築を目指しています.また,複数車輪により構成される実際の探査ロボットのビークル制御を目的として,砂地斜面の直登や降下,横断時におけるテラメカニクスと運動制御にも取り組んできています. |
知能化・自律化技術 -Robot Intelligence and Autonomy-
|
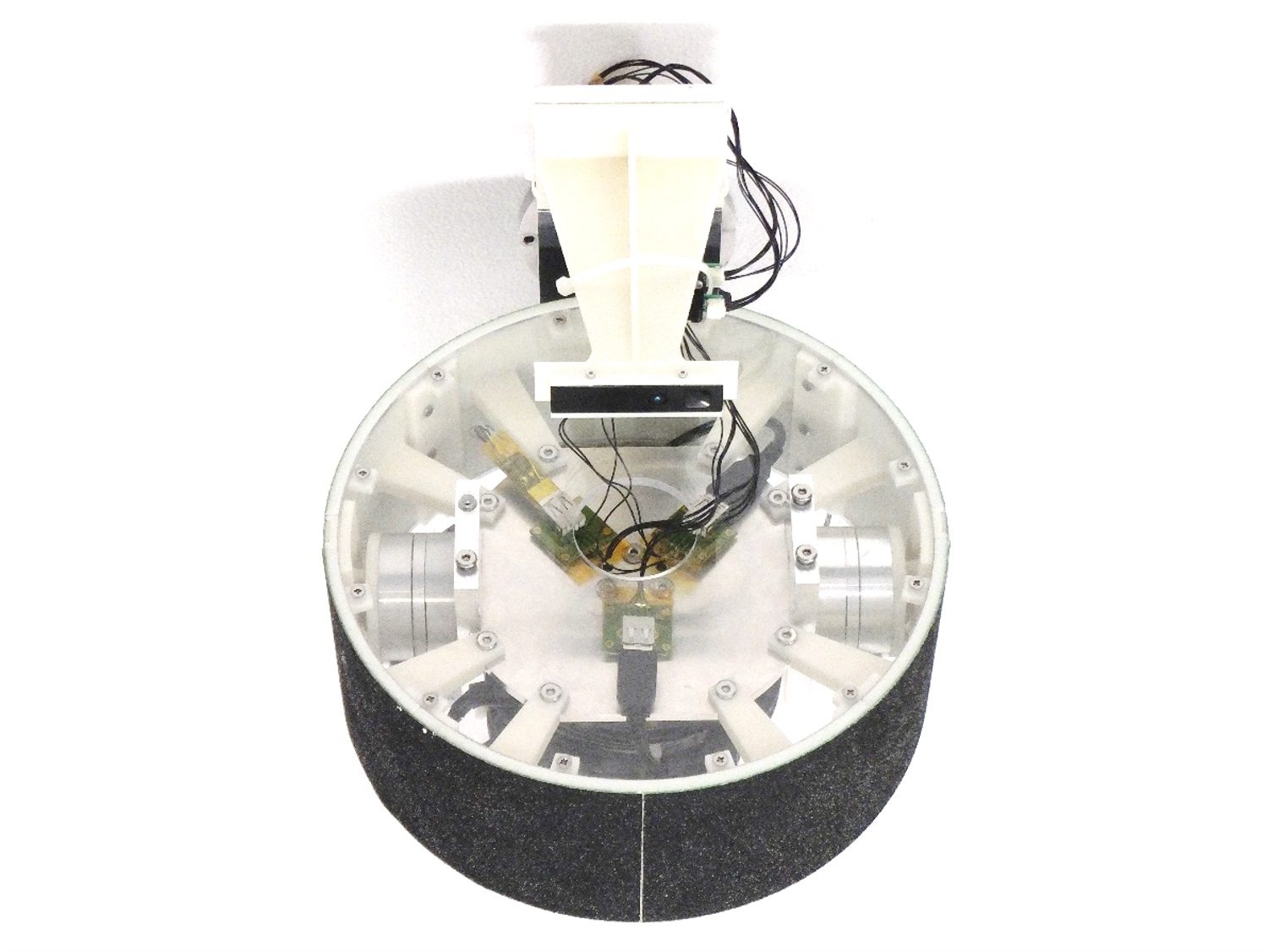
月や火星において,科学的関心の高い探査対象領域として,クレータや丘陵地などの急傾斜を含む軟弱な砂地が挙げられます.このような傾斜した砂地を探査ローバが走破する際には,車輪の沈下や,進行方向や斜面谷側への滑り(スリップ)を誘発しやすくなります.このような状況を避けるためには,ロボットが滑りや沈下,砂からの反力といった走行状態をオンラインで把握することが必要不可欠となります.この走行状態センシング情報を組み合せた,よりスマートな知覚車輪ユニットを開発し,これらを統合することで,クロスモーダルな知覚情報を車輪型探査ロボットの研究開発を進めてきています(この成果はJKA機械工業振興補助事業の助成を受けて実施しました).さらに,知能化・自律化に向けた取り組みとして,RGB-Dセンサを用いた機械学習に基づく環境認識や地形分類,および分類した地形の傾斜の観測結果に基づく車輪のスリップ予測システムの構築に取り組んできています. |
|
極限探査テクノロジー -Extreme Exploration Technology-
月や火星などの地球外天体上に限らず,地上においても従来の移動ロボットではアクセス困難な未踏領域は数多く存在している.その中でも,断崖絶壁でのフリークライミングと地中への掘進(掘削推進)を可能とするロボット技術の実現に向けた研究開発を進めています.いずれの技術も,これまでのロボット技術では実現困難なタスクの実現を可能とするフロンティア技術である.
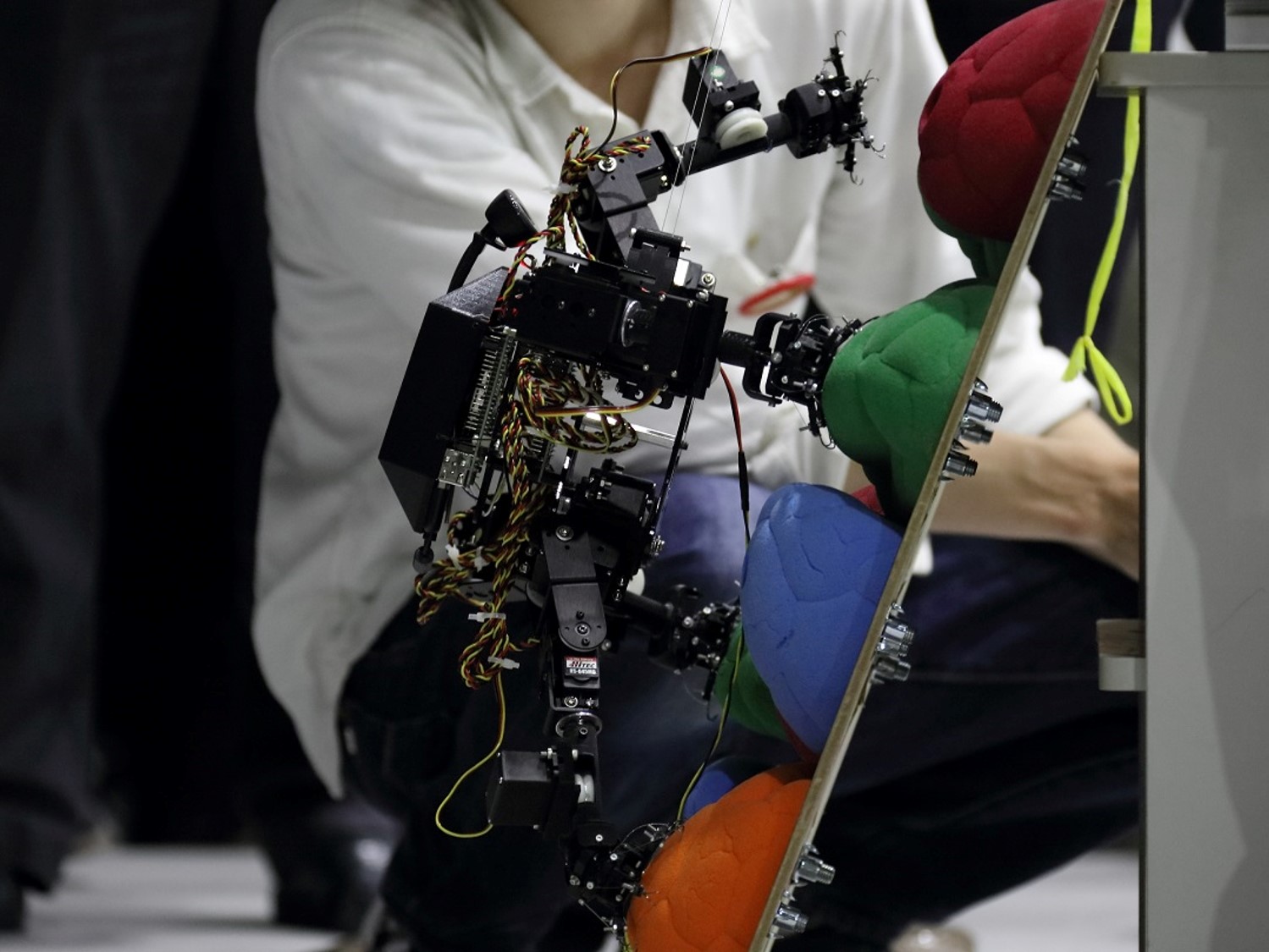
フリークライミング・ロボティクス -Free-Climbing Robotics-
|
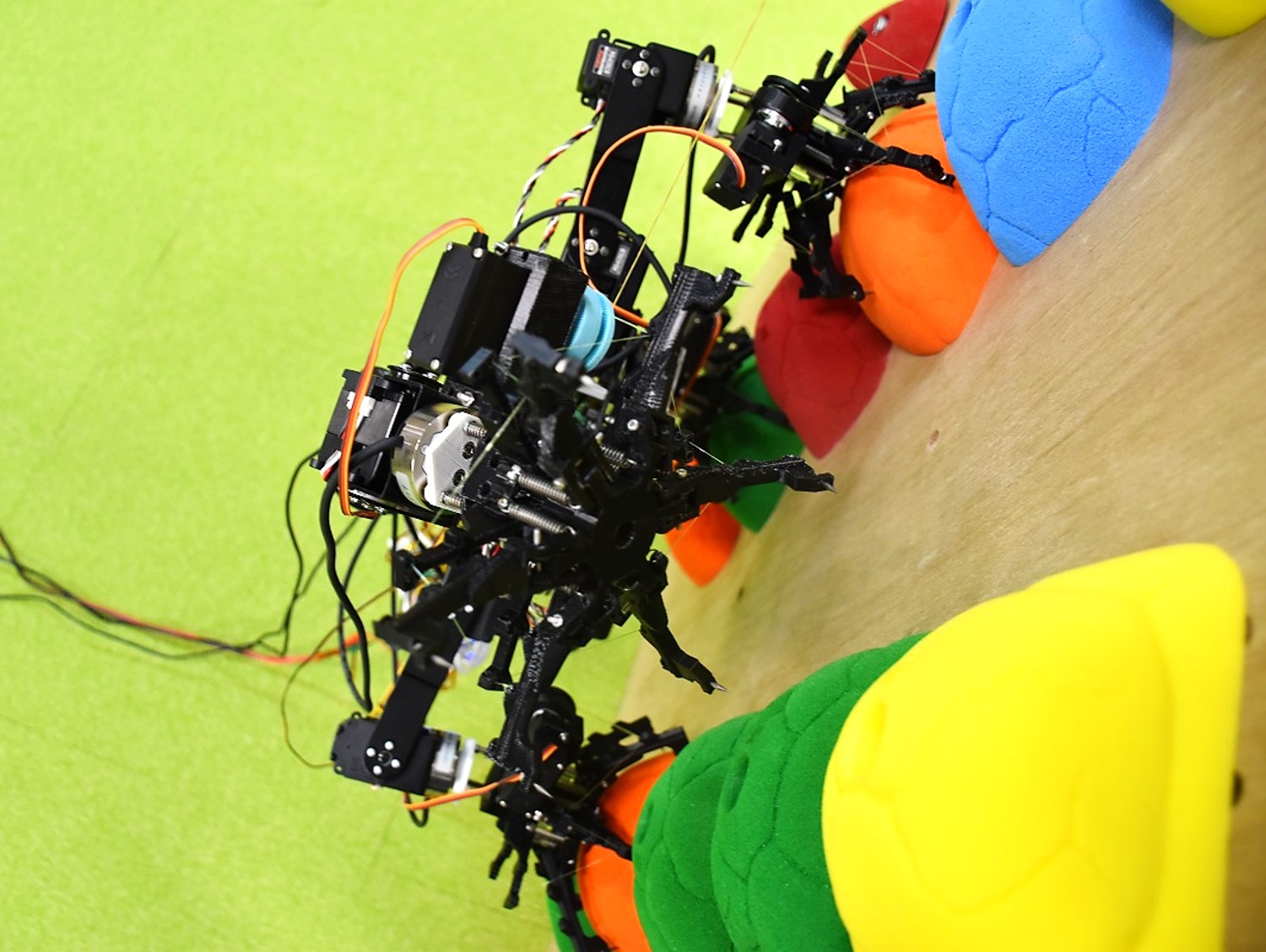
自然界の断崖絶壁に代表される凹凸急傾斜地形は,従来の移動探査ロボット(車輪型や履帯型,脚型など)がアクセス困難な未踏領域の一つとされています.断崖絶壁クライミングを実現する上では,ゴツゴツとした岩肌を確実に掴むことのできるロボットグリッパの実現が最も重要な技術課題となります.これまでに,岩石への強靭かつ効率的な「しがみつき」を可能とするパッシブ型鉤爪グリッパを開発し,四肢型ロボットによるフリークライミング能力を実証してきました.また,フリークライミング動作の自律化に向けたセンシングと歩容制御に関する研究を進めると同時に(この研究はJSPS科研費JP18K13721の助成を受けて実施した内容です),より適応的な生物規範型グリッパの創成(この研究はFAIS新成長戦略推進研究開発事業1の助成を受けて実施した内容です)に取り組んでいます.また,従来のフリークライミング技術を飛躍的に拡大する,テザークライミング移動に関する発展研究(この研究はJSPS科研費20H02119の助成を受けて実施している内容です)も進めています.これらのフリークライミング・ロボット技術は,月面の縦孔や溶岩チーブ,地上の洞窟内などのロボット極限探査への応用が期待できるフロンティアテクノロジーです. |


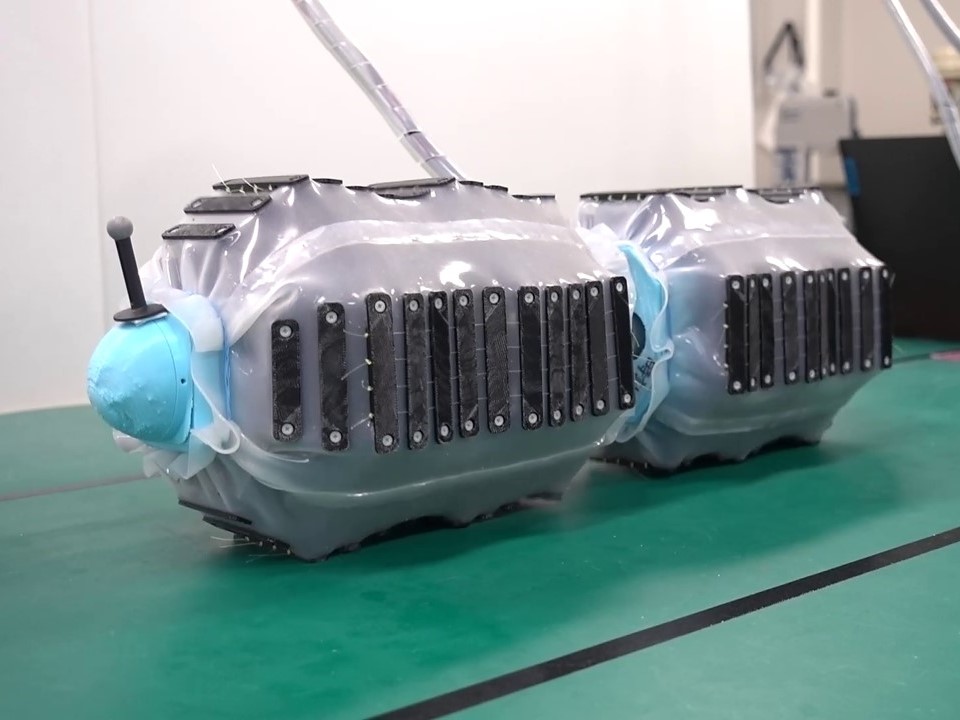
地中掘進ロボティクス -Robotics for Subsurface Access-
|
月や火星などの重力天体の探査において,長周期地震計や熱流量計などの長期定点観測用のセンサ機器を埋設することを目的とした埋没型の掘進(掘削推進)するロボットシステムの研究開発を行っています.一般的な移動ロボットと比較して,ロボット自身が地中を掘進する上では,「移動空間をロボット自身で生成する」ことと「ロボットの周囲は圧縮性の土壌によって不均一かつ三次元的に拘束されている」ことを考慮した効率的な掘削推進メカニズムの実現がキーテクノロジーとなります.このような地中に埋没して掘進するロボット技術は,地下層の地質サンプリングや地球外天体での建造物の建設作業などへの応用も期待できる先進技術です.さらに,これまでの螺旋スクリュ機構を利用した掘進メカニズムに加えて,螺旋翼を用いた全周波動伝播機構を応用した新たな掘進メカニズムの創成に向けた基礎研究(この研究は,カシオ科学振興財団,JKA機械工業振興補助事業の助成を受けて実施した内容です ※JKA成果報告)を進めています.また,波動伝播機構を応用した走行ロボットの研究開発も進めています。 |
|