RESEARCH
The thesis list in our laboratory is here.
The research funding and grant are listed here.
The Lab YouTube channel is here.
Research Discipline
OUR SCOPE: Space Robotics and Mechatronics

Microgravity Robotics
Microgravity is one of the extreme environmental conditions in space robotics. This research addresses dynamics and control of space robots in microgravity. In this discipline of "Microgravity Robotics", it is required to understand and properly control "physical interaction" with surrounding environments and "inner-reaction" induced by the motion of the robot itself.
Orbital Robotics
|
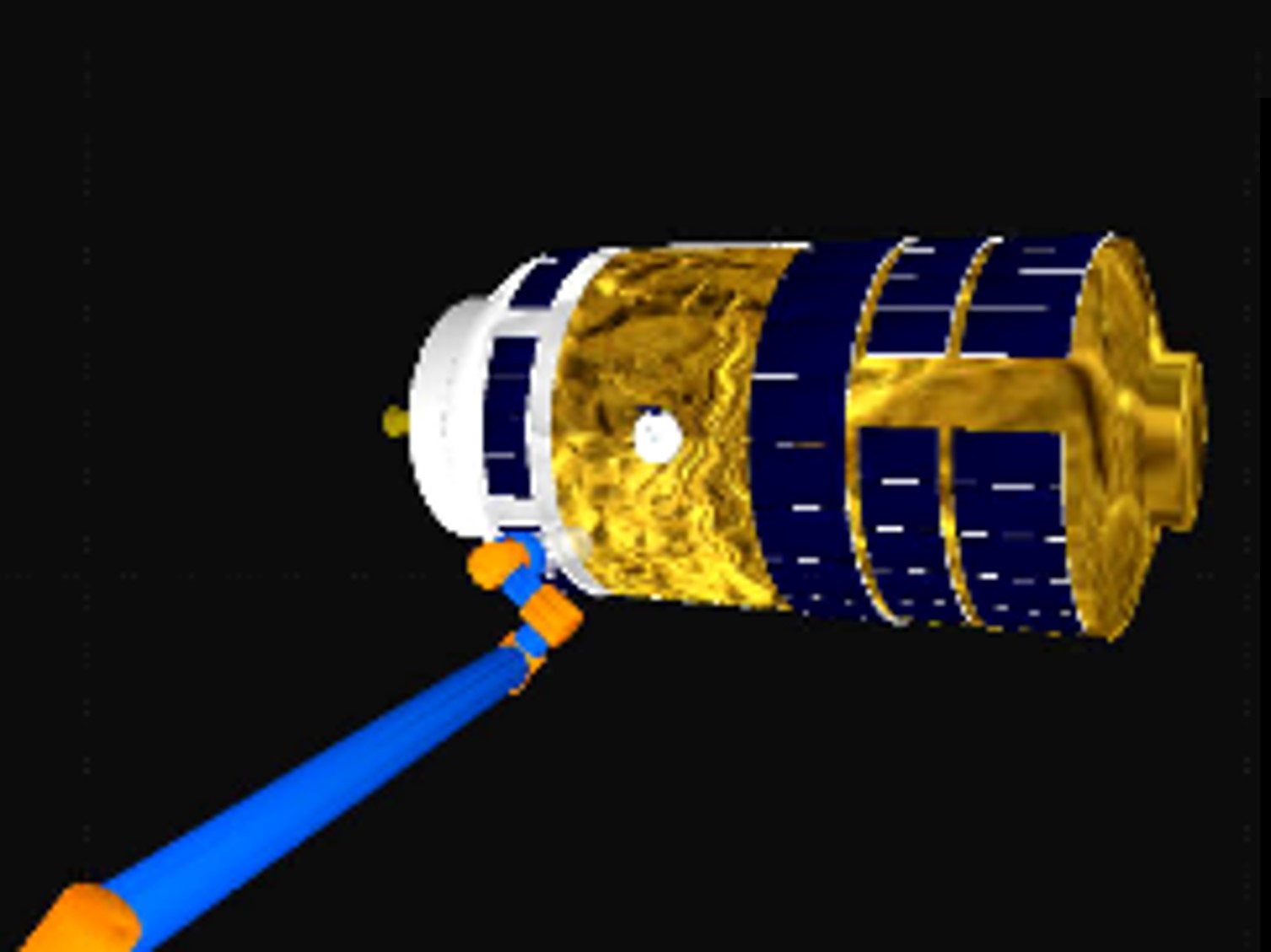
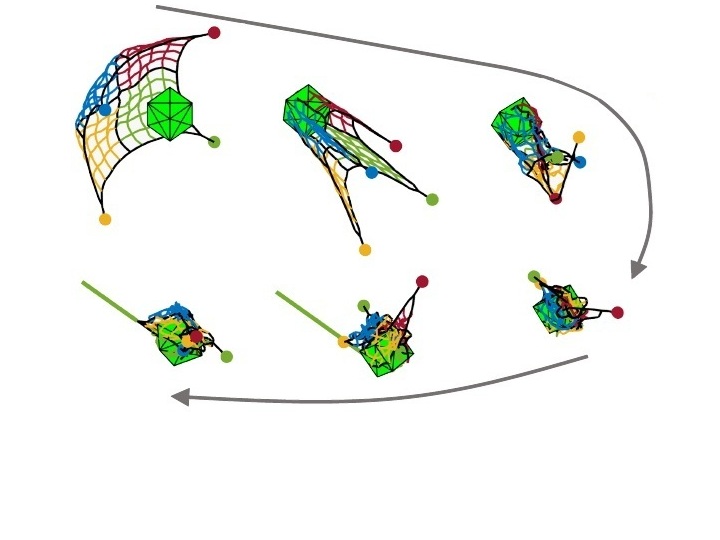
Increasing space debris is a serious environmental problem in space, and thereby its mitigation is necessary for permanent space utilization. This research mainly addresses dynamics and control of a space robot with multi-D.O.F. manipulators in a capture sequence of tumbling space debris in an orbit around Earth. Due to the microgravity, the capture mission becomes more complicated to properly control contact/impact between the robot and the debris toward secure capture. To cope with this issue, we have proposed and experimentally evaluated a capture method by a dual-arm robot based on concepts of repeated-impact and geometric caging, respectively. Further to this research, orbital capture an unmanned space vehicle by space manipulators mounted on relatively large space structures has been studied. Recently, development of a high-damping robot has been addressed for future debris capture missions. Recently, we have been developing a dynamics simulator and analyzing experiments to study space debris capture using a flexible net structure (This work was supported by JKA Research Grant). |
Robotics for Minor Body Exploration
|
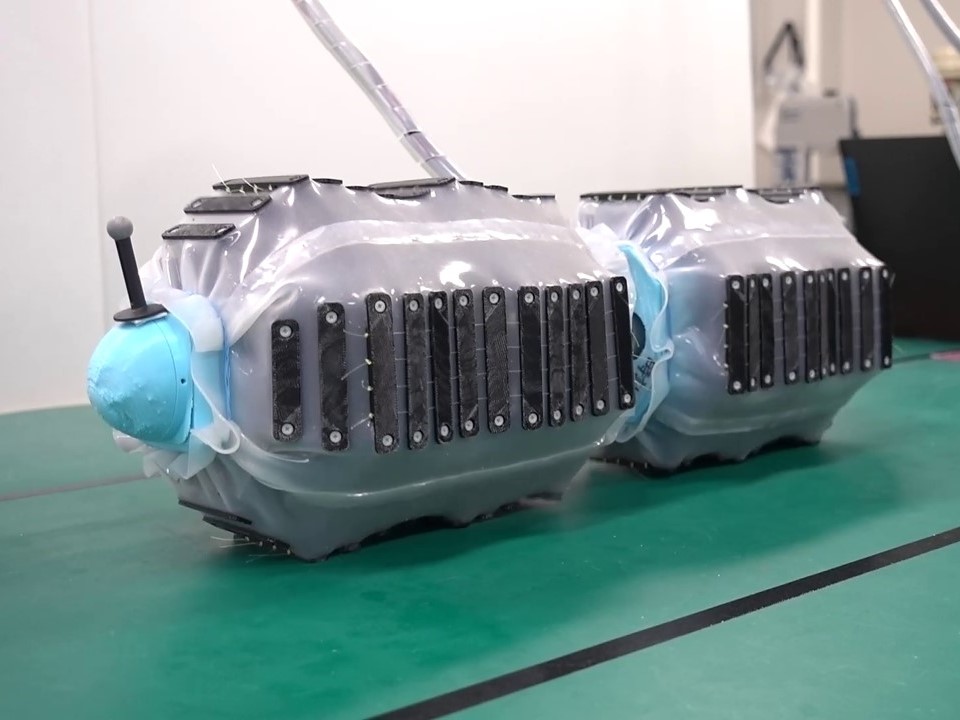
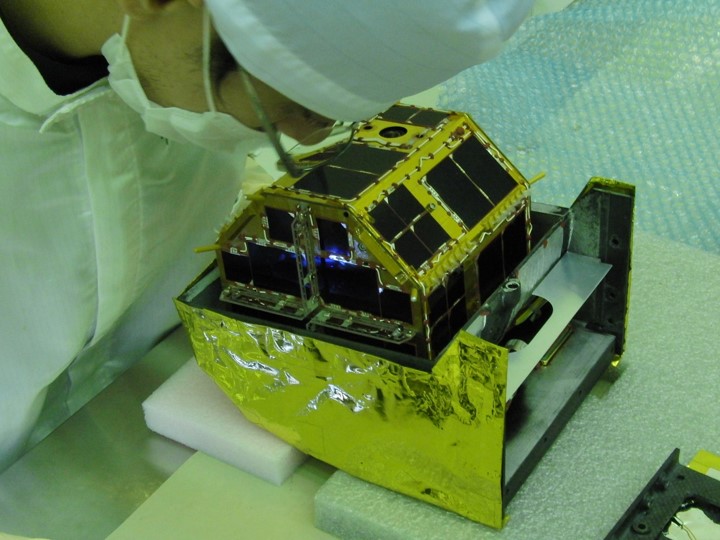
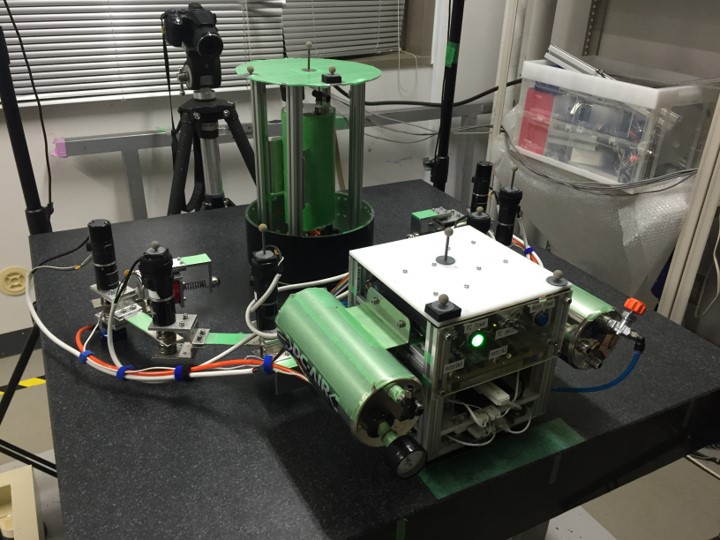
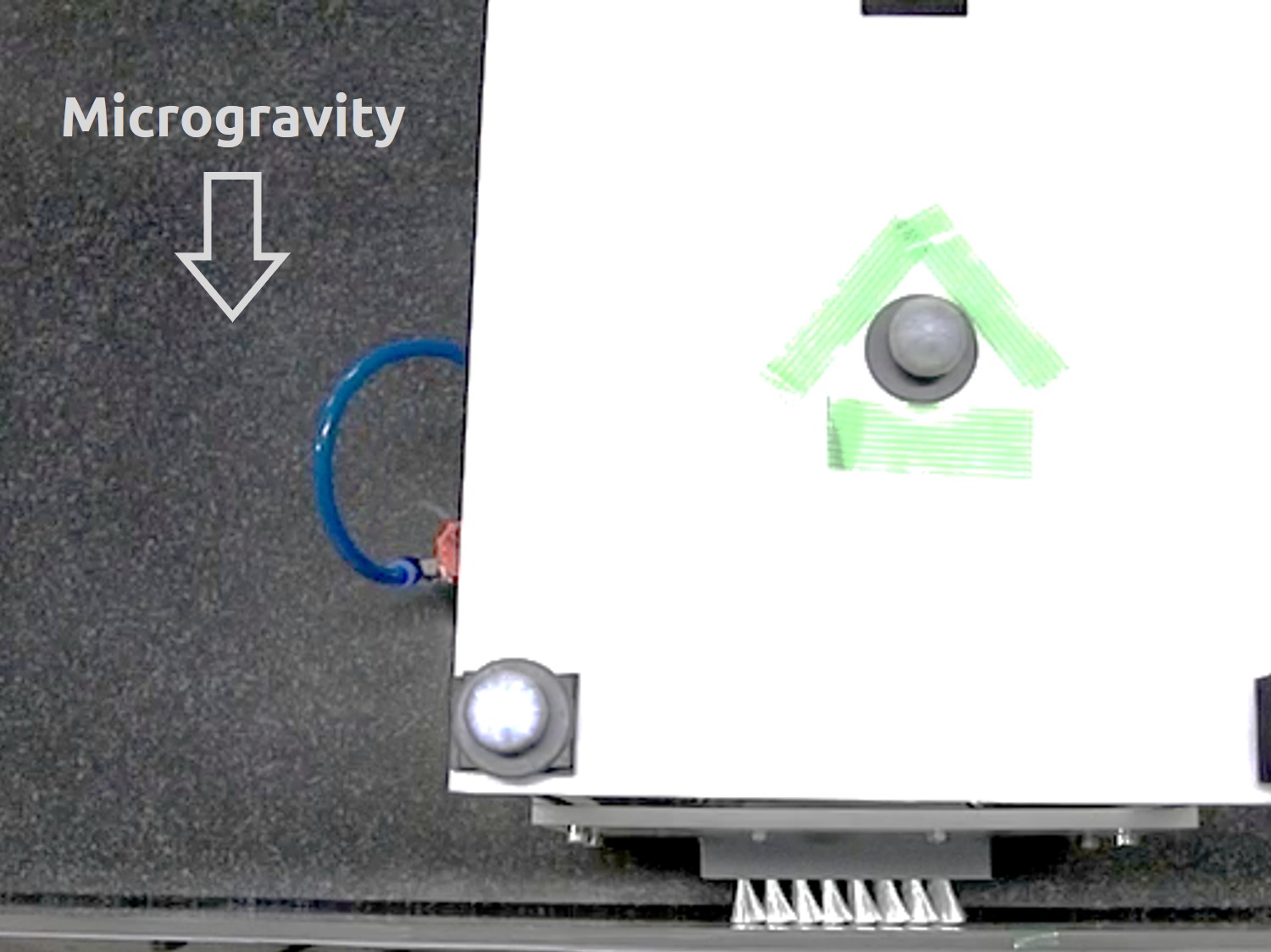
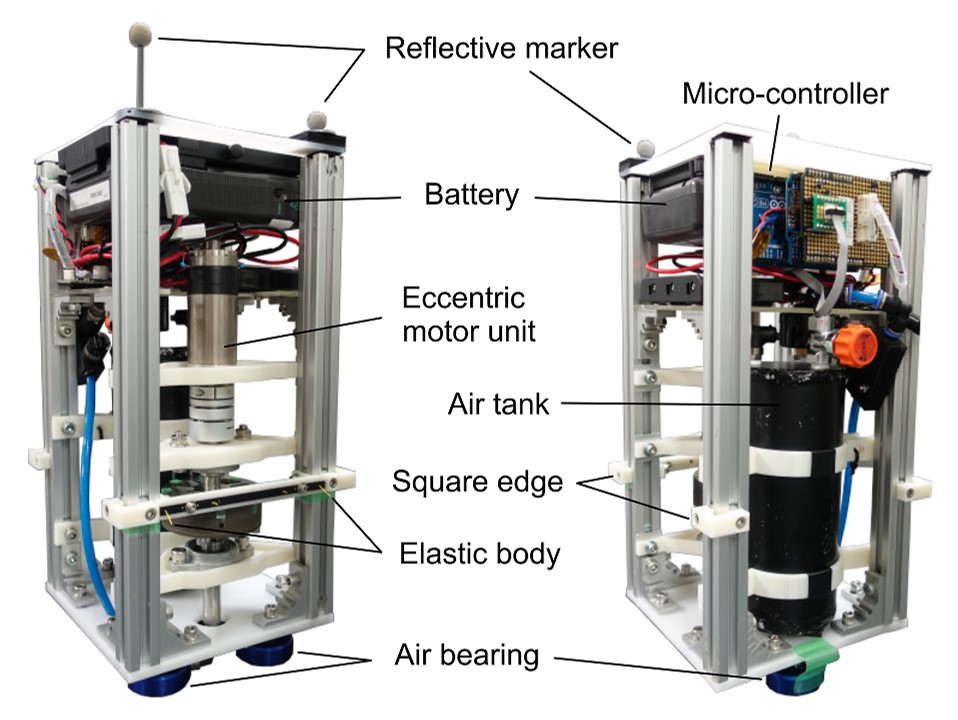
In order for future robotic exploration of minor bodies in our solar system, such as asteroids or comets, development of a advanced locomotion mechanism in unknown and non-uniform terrains with microgravity is one of the key technical challenges. As innovative mobility in microgravity, we have demonstrated ciliary vibratory locomotion, which is partially supported by JSPS KAKENHI JP24760193. Expanding this concept, bimodal mobility actuated by a single eccentric motor with surface elastic bodies has been proposed and verified. Dynamics modeling and motion control of these new mobility systems are studied with theoretical and experimental approaches. In addition to these works on robotic mobility, as a university consortium member, we have collaboratively developed the flight model of a small asteroid exploration robot system, named MINERVA-II-2, which is carried on the HAYABUSA 2 spacecraft. |
|
 Planetary Robotics
Planetary Robotics
Dynamics and control of wheeled rovers for lunar/planetary exploration have been addressed. In general, extraterrestrial surfaces like the Moon or Mars are covered with fine soils (regolith), and thus better understanding of interaction between a wheel and soil is necessary for achievement of rover missions. With this mechanical interaction, the rover is needed to be properly controlled with limited sensor data. Furthermore, implementation of robotic intelligence and autonomy is a key technology for unmanned rover systems.
Terramechanics
|
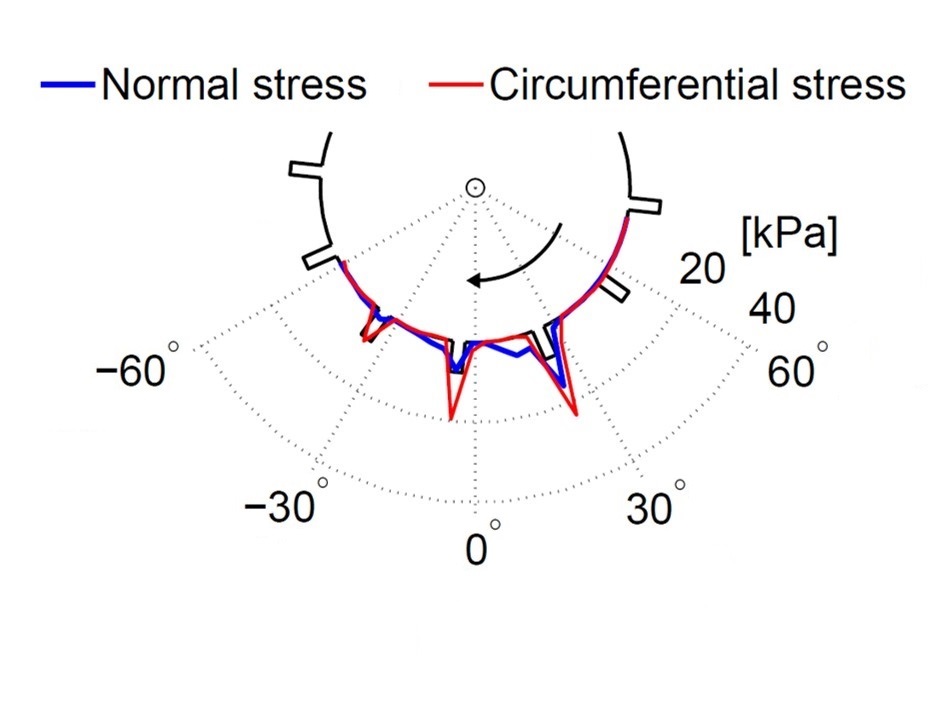
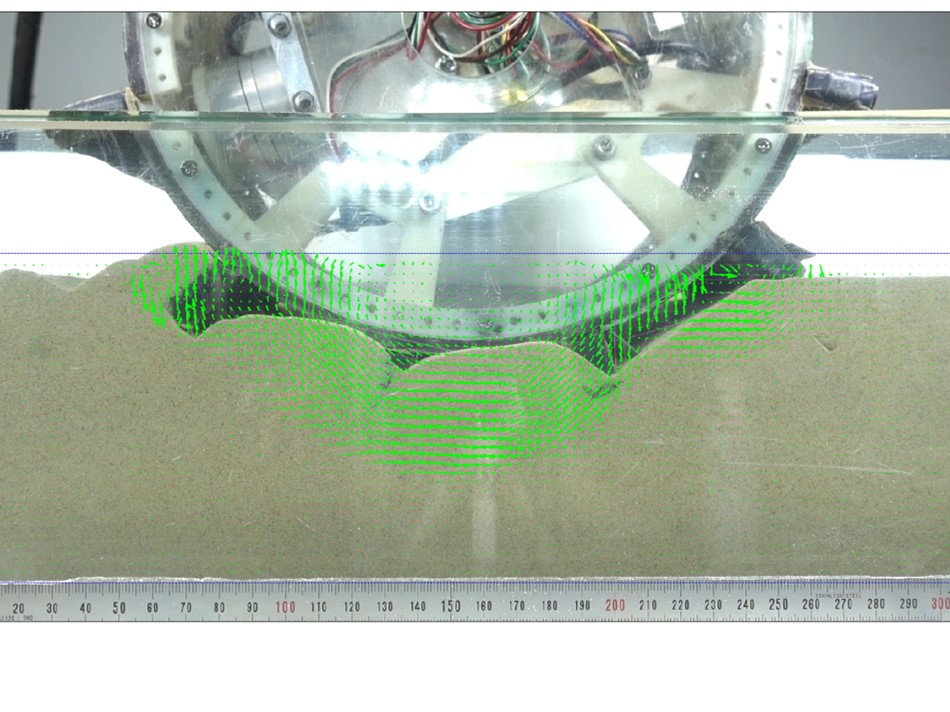
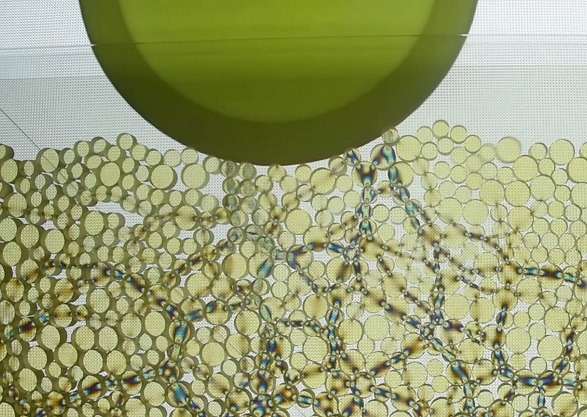
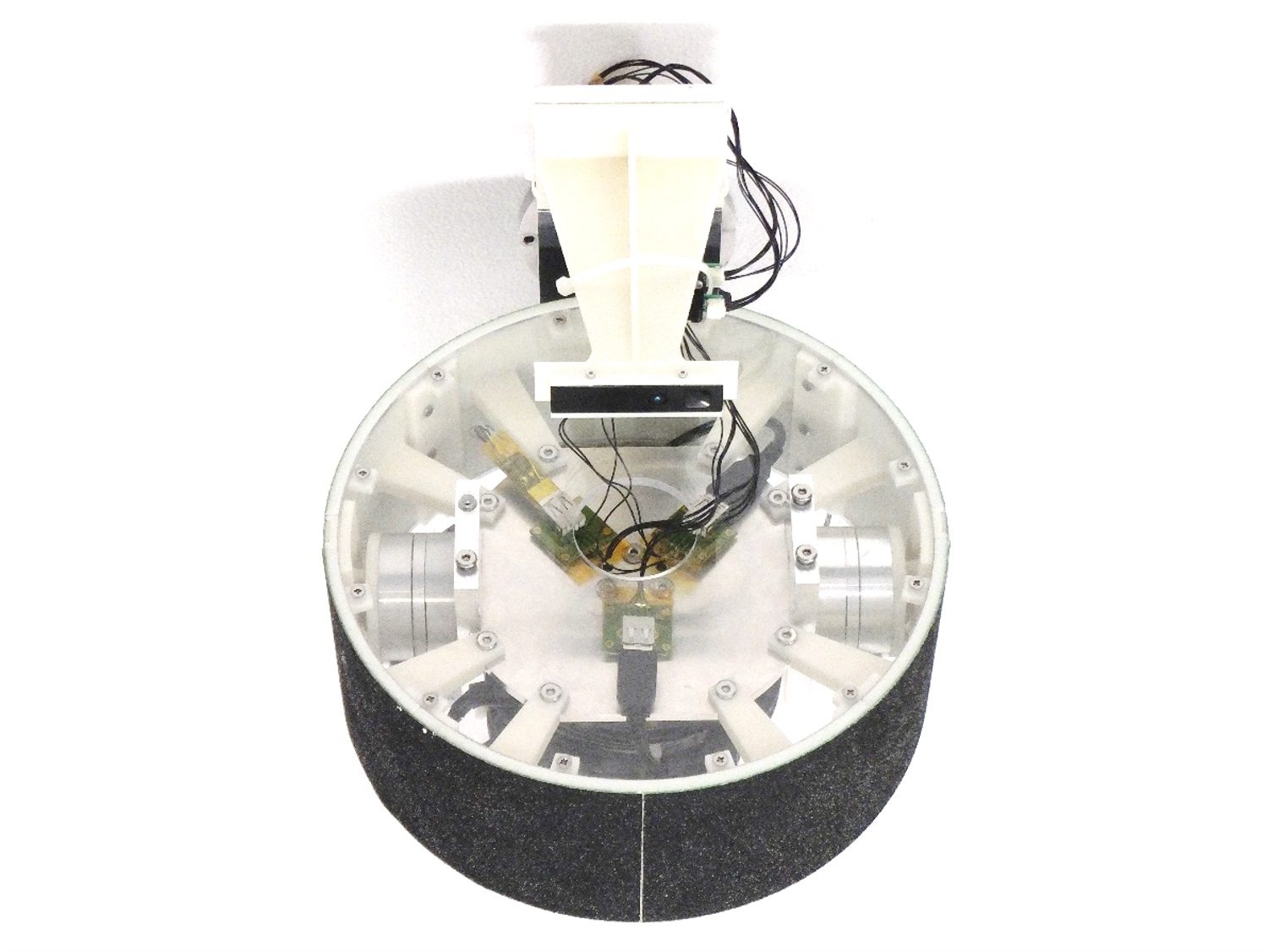
In order for the rover to accomplish reliable wheeled locomotion on loose soil, interaction mechanics between a wheel and soil, called Terramechanics, must be systematically grasped with theoretical foundation. The influence of terramechanic factors on mobility performance of wheeled locomotion are also needed to be elucidated. For understanding the interaction, stress distributions acting on both slick and grouser wheels have been experimentally shown by installing force/torque sensors. Also, the soil flow, which is soil deformation beneath a grouser wheel, has been analyzed by PIV (Particle Image Velocimetry). In addition, we propose a photoelastic method for analyses of wheel-soil interaction. These multifaceted results can accelerate elucidation of the interaction. Furthermore, motion control of a multi-wheeled rover has been researched for challenging locomotion such as ascending, descending, or traversing in sandy slope. |
Robot Intelligence and Autonomy
|
As an area of intense scientific interest on the Moon or Mars, a crater or hilly terrain is required to be investigated. To achieve robotic exploration in such difficult terrains, the wheeled rover must control its motion as sensing its wheel slippage, sinkage, and soil reaction force. Hence, development of a synthetic sensing system for on-line estimation of the rover's traveling states is required. So far, we have developed an intelligent wheel unit that can estimate the slippage, sinkage, and reaction force. Toward a practical application of this advanced sensing system, a rover system with the intelligent wheels is developed and verified through field tests, which is supported by JKA KEIRIN RACE. Furthermore, terrain classification and slip prediction with an RBG-D camera have been demonstrated based on a machine leaning approach. |
|

Extreme Exploration Technology
Various extreme environments that conventional mobile robots can not access remain in existence, of which a cliff wall and subsurface are required for future robotic missions in space. To realize such challenging robot systems, free-climbing technique and subsurface excavation/propulsion mechanism are key technologies to be developed. These frontier technologies are also expected to pioneer a new generation of robotic exploration.
Free-Climbing Robotics
|
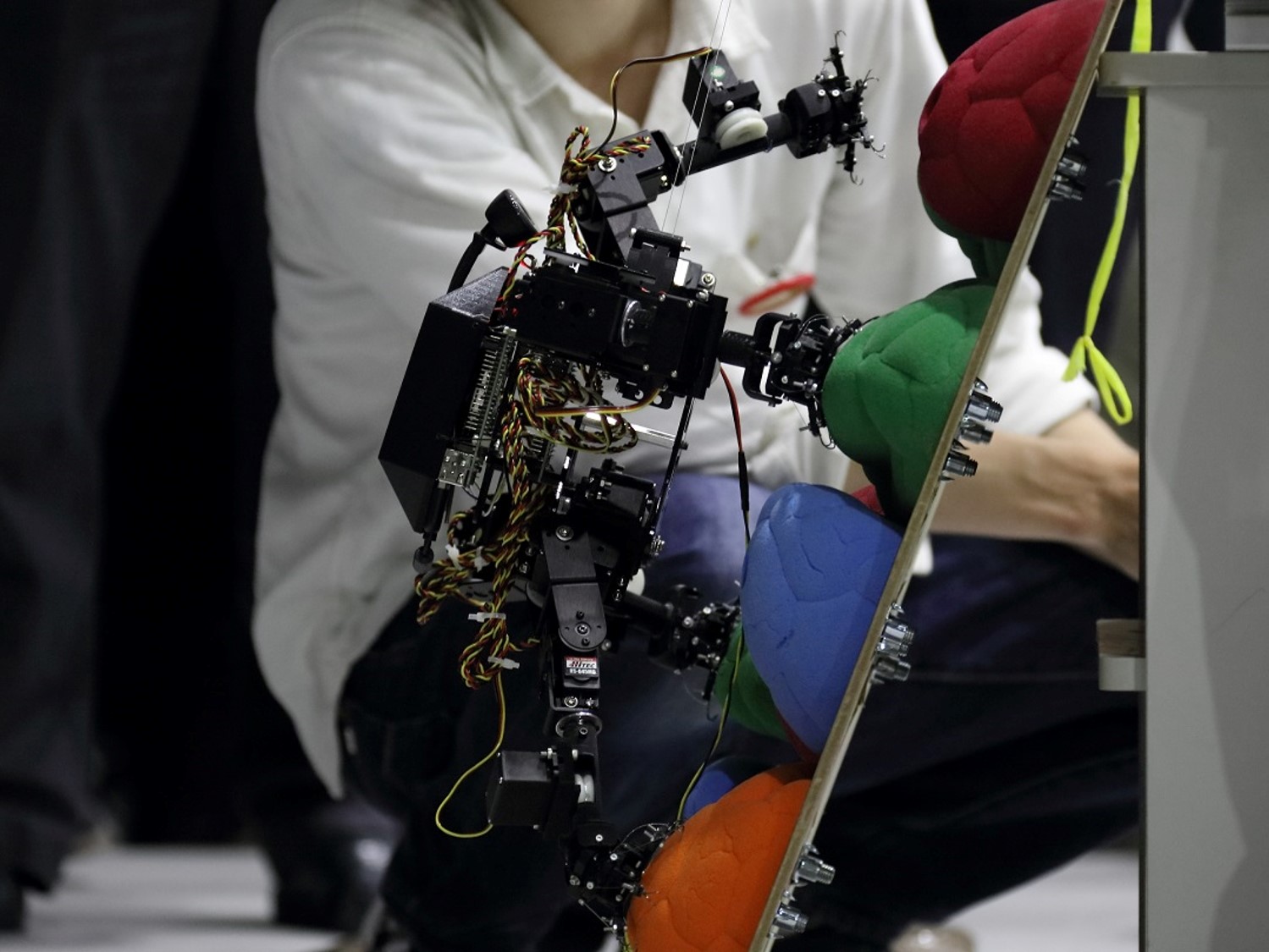
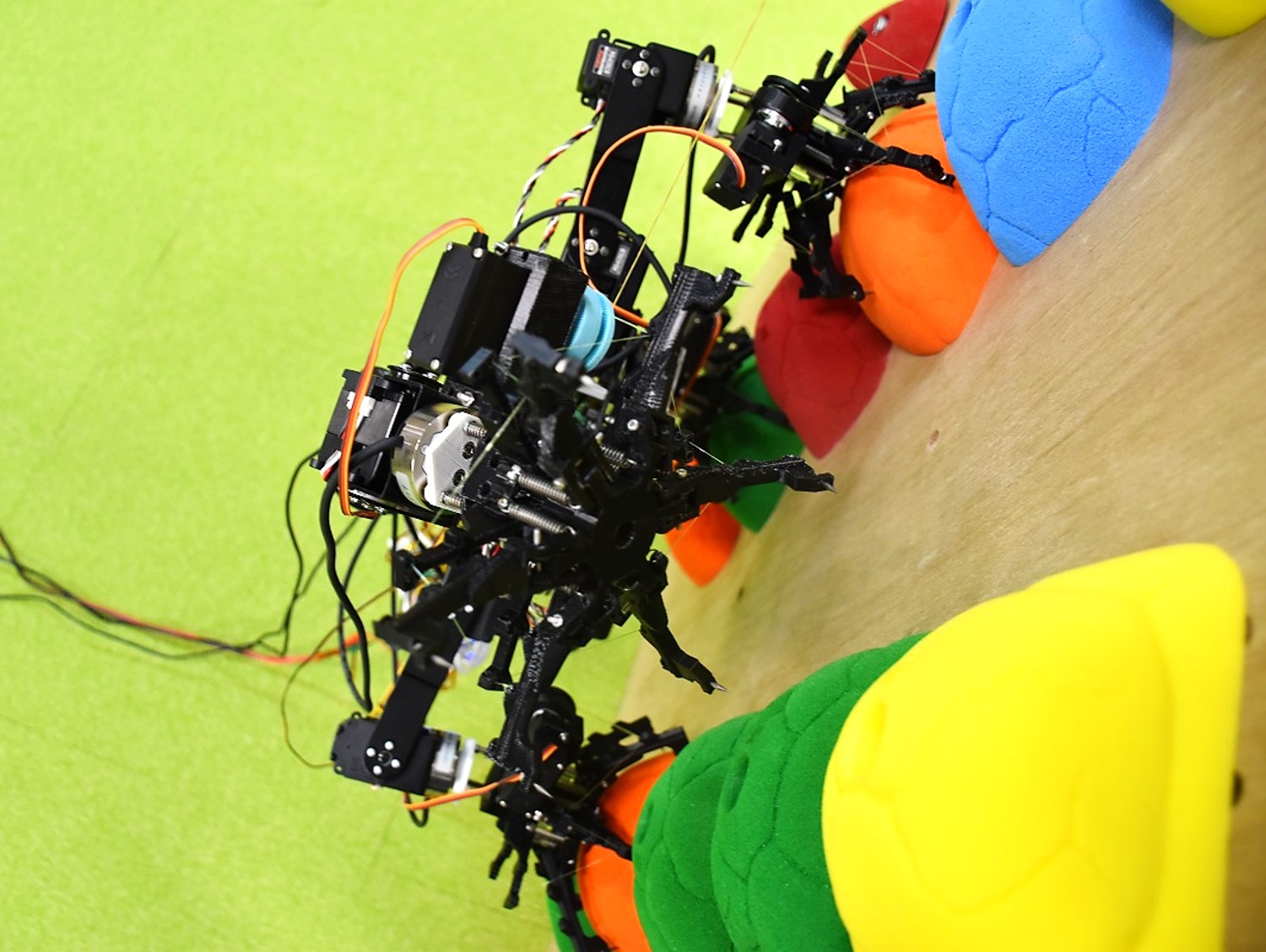
Rugged steep slopes in nature, like a cliff wall, are untraversed (or inaccessible) extreme environments for conventional mobile robots. To achieve robotic free-climbing in such environments, a smart gripper which can tightly hold rugged surfaces must be developed. We have proposed a passive spine gripper, and developed a four-limbed robot with the grippers that can demonstrate free-climbing locomotion in an artificial rocky wall by manual operation. Also, toward autonomous control of free-climbing motion, an intelligent gait control method with limited sensing data is studied, which is supported by JSPS KAKENHI JP18K13721. Furthermore, in order to achieve robotic free-climbing in natural environments, development of a bio-inspired gripper is addressed to improve gripping performance and adaptability. This free-climbing technology is expected to be applied to robotic missions in lunar skylights or lava tubes, or caves. |


Robotics for Subsurface Access
|
In future lunar and Martian exploration, a drilling robot, which performs self-burying into soil like a mole, is one of the key technologies to perform sampling of subsoils and bury scientific instruments, such as a long-term seismometer or a heat flow meter. To accomplish robotic subsurface accessibility, generation of locomotion space forward the robot and negotiation of three-dimensional constraint from surrounding soils must be achieved. We have proposed drilling mechanism by an Archimedean screw spiral, and it also applied to mobility on sandy surface. The drilling technique can also be applied to construction of space structure in future. Further to this drilling mechanism, currently we have addressed development of a novel drilling mechanism based on mechanical wave propagation like peristaltic motion. |
|