RESEARCH
2024年度 JKA機械工業振興補助事業研究補助
柔軟ネットを用いた宇宙デブリ捕獲シミュレータの開発
研究の概要
|
本研究では,近年研究開発が本格化している,柔軟なネット構造(網)を用いた宇宙デブリ(宇宙ゴミ)捕獲技術のための,多様な形状・慣性・運動を有する浮遊するデブリを柔軟ネットで捕獲する際の動的挙動を包括的に解析可能な動力学シミュレータを開発する.とりわけ,柔軟なネット同士の絡まり合い挙動,さらには複雑形状を有する浮遊デブリと柔軟ネットとの三次元の引っ掛かり現象を数理的に表現し,捕獲完了までの捕獲フェーズを一貫して評価・解析できる計算機環境を構築する.これにより,地上において柔軟ネットの設計最適化や捕獲前後で必要となる制御則構築を促進し,信頼性を担保した宇宙デブリ捕獲システムの実用化を加速させる成果を実現する. |
|
|
本研究で開発する動力学シミュレータは,汎用的な高性能演算装置1台を前提として,計算コストを最小化した動力学モデルを新たに導入することで,柔軟ネットを用いた宇宙デブリ捕獲技術の実用化を推し進める個人や組織が広く利用可能な基盤技術である.また,本研究においては,柔軟ネットを用いた宇宙デブリ捕獲の数理モデリングを精緻化と計算機への実装を並列して推し進める研究開発体制により,動力学シミュレータの開発を実現した.加えて,動力学シミュレータの結果を実験結果と比較・検証・評価するため,模擬無重力環境(屋内実験室での模擬実験,および落下塔を用いた微小重力実験)での柔軟ネットを用いた宇宙デブリ捕獲挙動に関する試験装置の製作と実機試験を実施した.本研究では,これら実験結果との比較・検証を通じて,開発した動力学シミュレータの妥当性・有効性を示す成果を実現している. |
研究目的
本研究では,持続可能な宇宙環境利用を実現するための,多様な形状・慣性・運動を有する宇宙デブリを対象に,柔軟ネットによる捕獲フェーズを包括的に解析可能な動力学シミュレータを開発することを目的とする.柔軟ネット構造と宇宙デブリとの複雑かつ高次元な接触現象をモデル化し,柔軟ネットの射出・展開から捕獲完了までの一連の動作を動力学的にシミュレーションすることで,実用化に向けた当該技術の信頼性の定量的な評価を実現する.
柔軟ネットを用いた宇宙デブリ捕獲の動力学シミュレータ開発に向けて,以下の4項目を具体的な技術課題とする.
(1)省計算コストな動力学モデリングと計算機実装
(2)屋内実験室での模擬実験解析
(3)落下塔での微小重力実験解析
(4)動力学シミュレータと実験結果との比較検証
研究内容
(1)省計算コストな動力学モデリングと計算機実装
本研究では,宇宙デブリと相互作用する柔軟ネットの動力学的挙動をモデル化する.ネットの変形,ネットとデブリの接触,ネット同士の接触のモデルを複数の方程式を組み合わせて表現する.これらの相互作用をモデル化することで,軌道上で宇宙デブリを捕獲するプロセスを定量的に評価とする動力学シミュレータの開発を目指す.
① ネットの変形の動力学モデル
先行研究より,ネットの変形時に各格子点に働く力は,線形ばねダンパモデルで表現できるとしてモデル化をおこなった(図1).このとき,ネットの変形時に格子点が隣り合う点から受ける力をモデル化した.この変形力のモデルには,ネットの軸剛性係数,減衰係数,格子点と隣り合う点との距離,展開状態における格子点と隣り合う点との基準距離が,パラメータとして含まれる.

図1:ネット変形の動力学モデル
② ネットの変形の動力学モデル
ネットとデブリの接触時には,ネット格子点はデブリに仮想的にめり込む(貫入する)ものとし,ネット格子点のデブリへの仮想めり込み量を定義した(図2).本モデルでは,デブリがネットの格子点から受ける垂直抗力と動摩擦力をそれぞれモデル化した.垂直抗力ベクトルは,上記①と同様に,線形ばねダンパモデルで表現できるものとした.これら接触力のモデルには,ネット格子点のデブリへの仮想めり込み量ベクトルと仮想めり込み速度,垂直抗力を表現する軸剛性係数と減衰係数,ネット格子点に対するデブリ表面上の接触点の相対速度の接触面との平行方向成分が含まれる.

図2:ネットとデブリの接触力モデル
③ ネット同士の接触の動力学モデル
ネットの格子点同士の接触挙動は,接触後の各格子点の速度が運動量保存則と反発係数の関係式で表現できるものとしてモデル化した.これは,ネットの各接触点は相対的に軽量であり,接触が短時間で完了することから,計算コストを最小化する目的で離散モデルによって表した.本モデルには,ネット格子点の質量,接触前後のネット格子点の速度に加えて,接触パラメータとして相対速度に基づく反発係数が含まれている.これにより,ネット同士の絡まりあいの表現を実現した.ネット同士の絡まりあい挙動を検証するシミュレーションとして,ネットの折り畳み動作の解析結果を図3に示す.これにより,低計算コストでネット同士の接触を表現可能であることを示すことができた.

図3:ネット折り畳み動作のシミュレーション解析の結果
(2)屋内実験室での模擬実験解析
① ネットの変形の動力学モデル
実験で使用する柔軟ネットの変形時の軸剛性係数を推定するために,ネットの静的たわみ形状に関する実験とシミュレーションの比較を実施した.図4に比較結果を示す.これにより,柔軟ネット(実物)の軸剛性係数を決定した.

図4:ネット軸剛性係数の比較結果
② 自由落下するデブリの捕獲実験
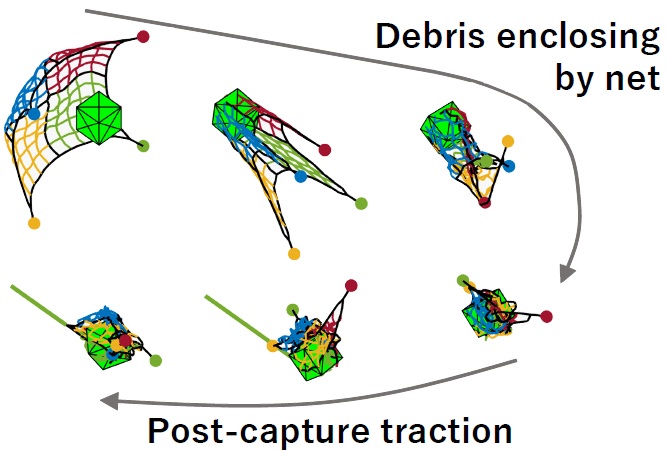
構築したネットの変形の動力学モデル,ネットとデブリの接触の動力学モデル,ネット同士の接触の動力学モデルの妥当性を評価するために,展開状態のネットに対してデブリを自由落下させる実験を実施し,動力学シミュレーションの結果との比較解析を実施した.図5に比較結果を示す.実験では,画像解析からデブリおよびネット四隅の錘の位置を解析した.比較結果より,動力学シミュレーションによって,デブリの包み込み捕獲挙動を再現できていることが定量的に確認でき,妥当性を示すことができた.

図5:ネットとデブリの接触力モデル
(3)落下塔での微小重力実験解析
株式会社植松電機が保有する落下塔施設COSMOTORREを用いて,微小重力環境下での柔軟ネットによる浮遊デブリの捕獲実験を実施した.これにより,軌道上の微小重力に近い環境における動力学的な挙動を観察・解析した.
図6に落下カプセル内の実験装置の概観,および実験結果の一例を示す.ネットによるデブリ捕獲の動的挙動を複数のカメラで撮像し,自由落下実験と同様に,画像解析からデブリおよびネット四隅の錘の位置を解析した.その解析結果に基づいて,ネットの動的挙動の時間履歴を解析し,動力学シミュレーションの結果とも相違ない挙動であることが確認できた.これにより,開発した動力学シミュレーションの有効性を確認することができた.

図6:自由落下するデブリの捕獲実験との比較結果
(4)動力学シミュレータと実験結果との比較検証
動力学シミュレータと実験結果との比較検証としては,前項(2)(3)にてまとめて示してある通りであり,本研究で目標としていた柔軟ネットによる宇宙デブリ捕獲を解析可能な動力学シミュレーション環境が構築できたと結論付けられる.
本研究にかかわる知財・発表論文等
Dynamics simulation involving entanglement of flexible nets for space debris capture
Tatsuya Oyama, Kenji Nagaoka
Proceedings of the 17th International Symposium on Artificial Intelligence, Robotics and Automation in Space, pp. 118-126 (#S3.P2-3), 2024.
スペースデブリ捕獲のための地上実験に基づく柔軟ネットの挙動解析
大山達也, 伊藤悠真, 吉田亮介, 永岡健司
第42回日本ロボット学会学術講演会, #2K2-06, 2024.
スペースデブリ捕獲時の柔軟ネットの包み込みと巻き付きに関する動力学シミュレーション
大山達也, 森友哉, 永岡健司
ロボティクス・メカトロニクス講演会2025, #1A2-D06, 2025.
本事業内容についての問い合わせ先
九州工業大学 大学院工学研究院 機械知能工学研究系
〒804-8550 福岡県北九州市戸畑区仙水町1-1
教授 永岡 健司
E-MAIL:CONTACTを参照
